Inverted Pendulum A Two Wheeled Self Balancing Robot
 Protoype of two-wheeled self-balancing robots
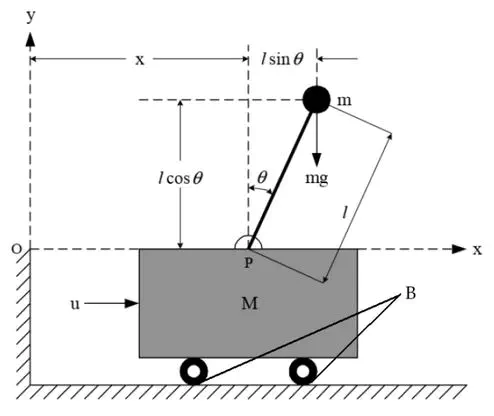
Protoype of two-wheeled self-balancing robotsA case study of Inverted Pendulum System was done with help of a self-balancing robot design alongside with Mathematical Modelling, Controller Design and Response Study of the system
Ahsan Ali
Electrical/Electronics Engineer
MSc Electronics Student at Politecnico di Torino. Holds BSc in Electrical Engineering with a minor in Computer Science. Previously worked as a Research Assistant and Embedded System Developer. My research interests include Power Electronics, Instrumentation and Controls, and Embedded Systems.